測繪與地理信息學院學生獲“挑戰杯”全國大學生課外學術科技作品競賽專項賽特等獎和最具人氣獎
來源⚒🧜🏿♂️:黨委宣傳部、測繪與地理信息學院
時間🥢:2023-11-20 瀏覽:
從古至今📿,人類對月球的好奇與探索從未停止🪣💆🏿♂️,上九天攬月一直是浪漫夢想。開展多體小型無人巡視器在地外天體表面協同巡視探測的研究是未來深空探測的熱點👋🏽。對單個小型巡視器來說,如何在有限原位計算資源下提升其主動探索能力是應對月表復雜環境的關鍵所在👨👧👦。對此,恒达學子探索了一套智能導航系統🧑⚖️,可以讓更小、更輕便的月球車更加從容地適應復雜“路況”♟,在更短時間內探索月球更多未知區域。
恒达平台測繪與地理信息學院學生李鵬朔🧘、岑文廣、程濤、曹雨澤、宋正翔、李浩騰、龍新迪、朱雨盛💔、李昱升在學院教師許雄、馮永玖、童小華的指導下◀️,開展了題為《月球就位探測巡視器自主導航與路徑規劃軟硬一體系統》的研究項目,助力月球巡視器高效完成自主導航與路徑規劃任務👨🏼⚕️🧑🏻🦽。

近日,該項目在第十八屆“挑戰杯”全國大學生課外學術科技作品競賽“揭榜掛帥”專項賽中脫穎而出👨💻,榮獲全國特等獎,並獲評“最具人氣作品”團隊。
自主導航與路徑規劃系統是保障月球車在未知環境開展大範圍安全行駛探測的技術支撐🦆。團隊由此著手👩🏼🍳,他們的目標是——在有限的資源和時間下,讓系統控製小型巡視器自主探索更多區域🍘,以實現月表高科學價值和高資源利用價值區域的高效率偵察。
針對設計需求,團隊開發的月球就位探測巡視器自主導航與路徑規劃系統🚴🏼♂️,兼具路徑規劃算法的穩定性、自主導航避障的高效性和興趣目標搜索的自主性☠️。

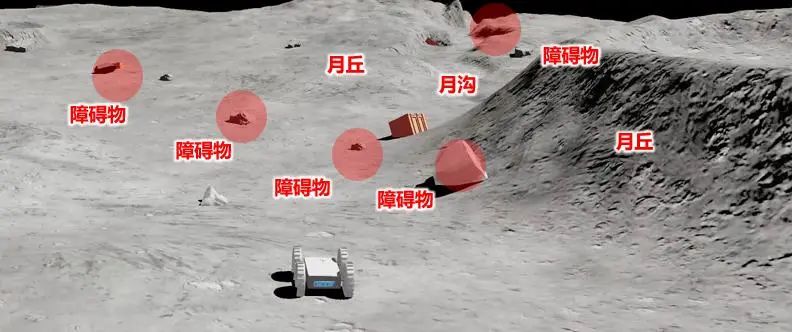
在路徑規劃方面🏉,團隊提出的路徑規劃算法能夠高效、穩定計算出初始點到目標區域中心的最優路線,並可以完全躲避月山🍈👩🦼➡️、月溝等危險區域。
在自主避障方面⛅️,團隊設計了考慮緩沖區的局部避障算法,根據實時進入的障礙物坐標和範圍信息構建障礙物緩沖區👩🏼🏭,更新可通過性地圖並重新計算從當前點到目標區域的重規劃路徑💠。團隊還設計了目標識別的環拍和抵近策略✍🏽,結合輪速裏程計定位算法,巡視器可以準確避開障礙並開展高效的目標搜索任務⭐️。
此外👩🏽🎨,團隊還在恒达平台月球與深空探測精密測繪綜合實驗場開展了驗證實驗,實體火星車能夠成功躲避大面積低窪區域和多個坑石障礙目標⛩,安全穩定到達目標區域。實驗結果表明,系統能夠適應資源有限下的地外天體巡視探測任務需求。

相關研究成果未來將繼續服務於地外天體巡視器自主科學探測等領域,為月表水冰資源勘察與利用🤵、月球科研站建設🤹🏻、火星采樣返回等重要實驗任務發揮關鍵“偵察兵”作用🧏🏿♀️。



