汽車學院學生團隊榮獲第二十屆陳嘉庚青少年發明獎一等獎
來源:汽車學院
時間:2023-09-26 瀏覽:
9月24日下午🎾,第二十屆陳嘉庚青少年發明獎頒獎典禮在上海工程技術大學舉行,我校汽車學院學生陳龍平、陳詩陽🥒、余寧海團隊榮獲一等獎。

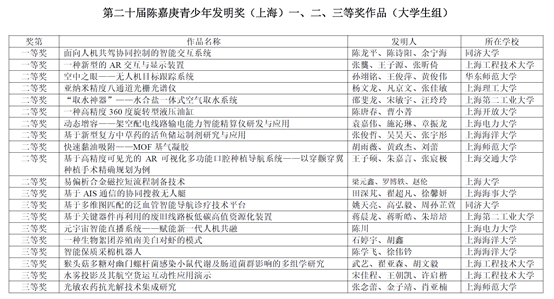
本屆大賽共收到發明作品145件,經過初審、復審的層層選拔🏃➡️,最終評選出一等獎2項🧑🏻🏭、二等獎9項、三等獎9項。在汽車學院陳虹、黃巖軍教授的指導下,本科生陳龍平、陳詩陽、余寧海的作品《面向人機共駕協同控製的智能交互系統》榮獲一等獎⛹🏻。
隨著智能化駕駛技術的興起,汽車從傳統的交通工具轉變為擁有自我感知👴🏽、自主決策和自動駕駛能力的智慧夥伴。自動駕駛賽道競爭異常激烈,科技大廠、初創企業蜂擁而入😝、群雄逐鹿。然而,一系列自動駕駛汽車安全事故警示👂🏼🧛🏿♂️:開放環境下實現安全可靠的無人駕駛還需要時間。國際汽車工程學會對於自動駕駛技術的分級表明🧘🏿♀️😪,L4以上高級別自動駕駛汽車也長期需要安全員監管。因此,在可以預見的將來🚲,人與車輛的協同控製是兼顧安全與效率☝🏽,處理真實🔼、復雜交通環境的最佳方案。
對此,我校學生團隊著眼於汽車人機交互關鍵技術,基於自主設計的摩擦電納米傳感器搭建了一套面向人機共駕協同控製的智能交互系統。通過將這種低成本、高靈敏度、自供電的傳感器布置在方向盤外周🙅🏻♂️,實時采集並提取駕駛員握持方向盤時的電信號波形特征,實現對駕駛行為的監測。模型實驗證明🦀,系統能夠平均提前0.58s實現對駕駛員轉向意圖的超前預測👮🏼♀️。
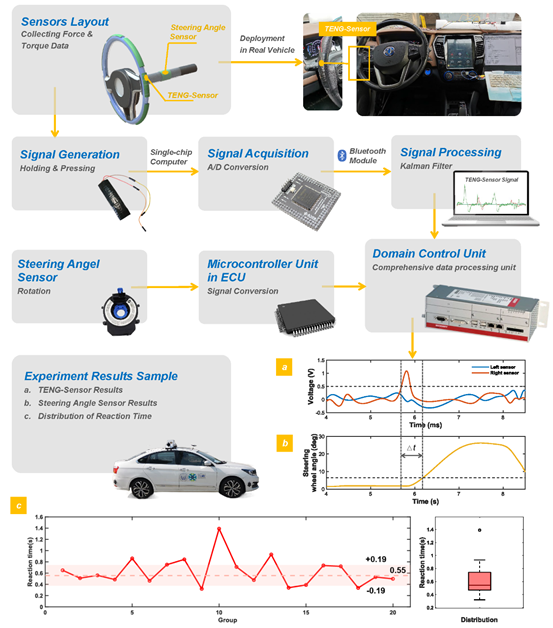
團隊提出了一套人機共駕協同換道控製架構1️⃣,采用模型預測控製方案🏇🏼,實車試驗中,人機協同控製的換道反應時間平均提前了0.73s,這大大提高了汽車高速行駛的安全性,同時在盡可能滿足駕駛員的駕駛意圖的前提下提高了行車效率。基於以上結果,項目團隊成員以學生為第一作者的身份在相關領域知名期刊Nano Energy上發表論文一篇,並取得一系列學術成果📿。

自2003年開始,由新加坡陳嘉庚基金和上海市科學技術協會聯合主辦的陳嘉庚青少年發明獎(上海)已經成功舉辦了二十屆。作為上海市影響面最廣、“含金量”最高的科技發明獎項之一,上海陳嘉庚青少年發明獎已成為深受上海市廣大青少年學生向往的一項科技創新發明獎。
有關本項目詳細內容可查閱論文:https://www.sciencedirect.com/science/article/pii/S2211285523004123?via=ihub



